^^
At the level of life:
1996: Born
1996-current: Figuring things out
But more has happened all along on the outside. At the level of human life. I feel modeling is the only version of truth we know which does not reflect the absolute truth and this is the aspect of all sciences and life in general that I enjoy. And so I've been exploring physics-based and data-based explicit and implicit models:
Currently: I am working at Merck Electronics M&I, continuing my research in deep learning for computer vision. This role leans heavily towards the applied side—our work doesn't end with a publication, but rather with a full solution deployed directly on wafer inspection tools. While initially a practical career choice, it has proven immensely rewarding for learning. The problem space is deeply constrained and challenging: we deal with scarce data, massively high-resolution images (~10000x10000) containing only tiny regions of interest that allowed me to tinker with foundation models and diffusion models which has been fun. And orthogonally, the strict requirement to deploy the final solution in a completely offline setting on the physical tool adds to the fun.
Prior to this: I was a Research Engineer in the MORPHEO team at Inria Centre at the University Grenoble Alpes under the supervision of Sergi Pujades. Before Inria, I completed the Paris-Saclay AI track of the Computer Science Masters, during which I did two internships at Naver Labs Europe in the Geometric Vision team, under the supervision of Boris Chidlovski and Leonid Antsfeld.
Publications
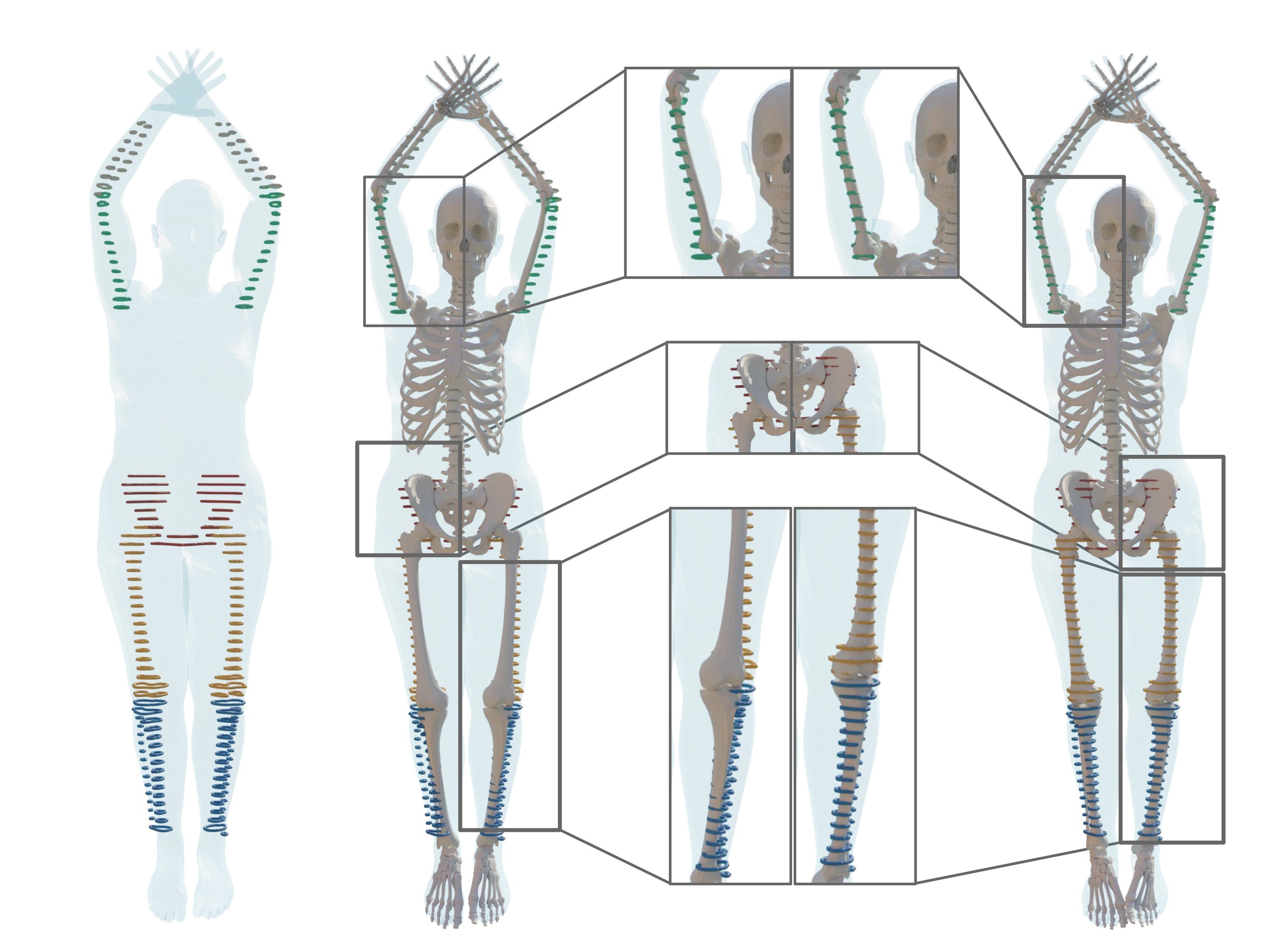
Abdelmouttaleb Dakri*, Vaibhav Arora*, Léo Challier, Marilyn Keller, Michael J. Black, Sergi Pujades
We aim to predict bone locations using only external 3D body surface observations. Existing methods lack proper validation on clinical imaging data, often suffering from 3D-2D projection issues. We improve this by using a dataset of segmented skin and bones from 3D MRI images, refining a model (SKEL) to create SKEL-J, which accurately fits segmented bones and skin. Our results demonstrate that SKEL-J predicts bone locations more accurately than previous methods.
MICCAI 2024 [Project Page]
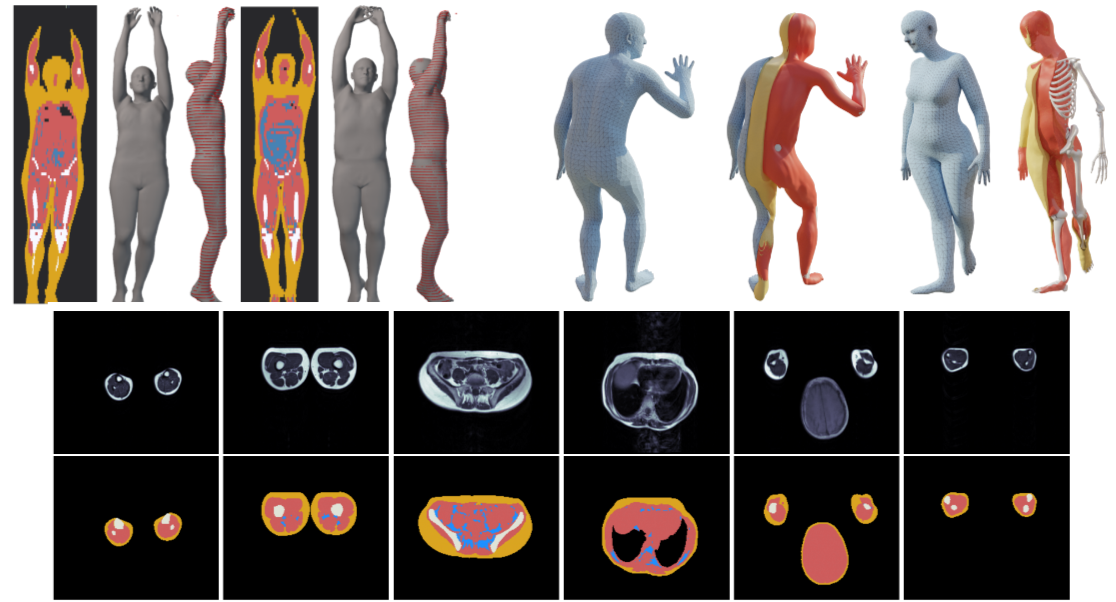
Marilyn Keller, Vaibhav Arora, Abdelmouttaleb Dakri, Shivam Chandhok, Jürgen Machann, Andreas Fritsche, Michael J. Black, Sergi Pujades
This work leverages the fact that the shape of the body surface is correlated with the internal anatomy; e.g. from surface observations alone, one can predict body composition and skeletal structure. And so we learn to infer the 3D location of three important anatomic tissues given the SMPL body mesh: subcutaneous adipose tissue (fat), lean tissue (muscles and organs) and long bones. I worked on the dataset creation.
CVPR 2024 [Project Page]
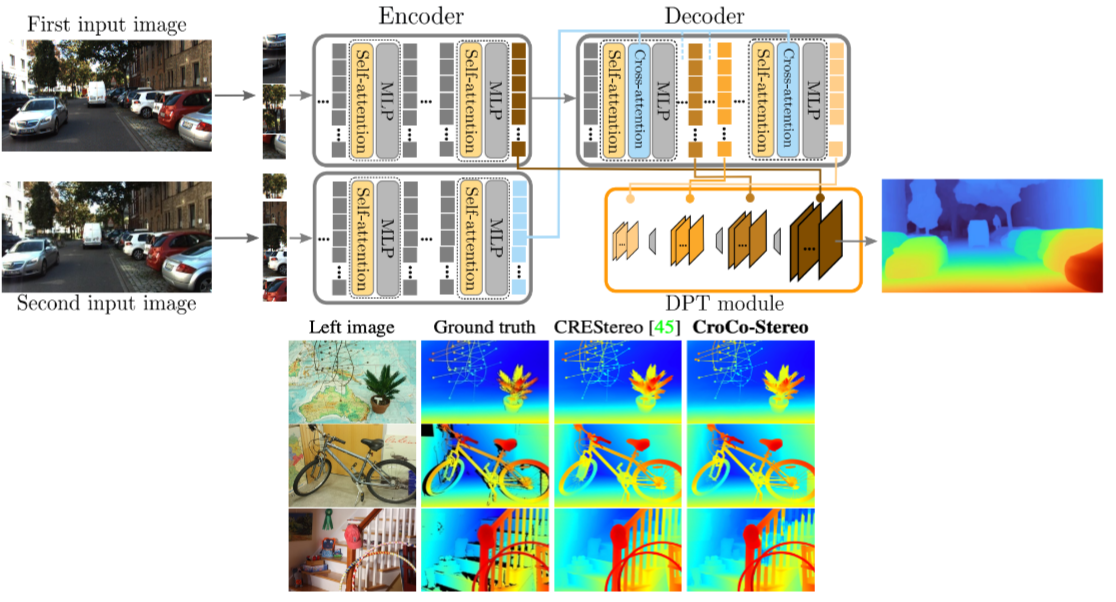
Philippe Weinzaepfel, Thomas Lucas, Vincent Leroy, Yohann Cabon, Vaibhav Arora, Romain Brégier, Gabriela Csurka, Leonid Antsfeld, Boris Chidlovskii, Jérôme Revaud
Building on the recent cross-view completion framework, a variation of masked image modeling that leverages a second view from the same scene which makes it well suited for binocular downstream tasks. The applicability of this concept has so far been limited and this work explores different avenues of improvement. With these improvements, we show for the first time that state-of-the-art results on stereo matching and optical flow can be reached without using any classical task-specific techniques like correlation volume, iterative estimation, image warping or multi-scale reasoning, thus paving the way towards universal vision models. I worked on getting SOTA results on the Stereo Matching task.
ICCV 2023 [Paper Link]
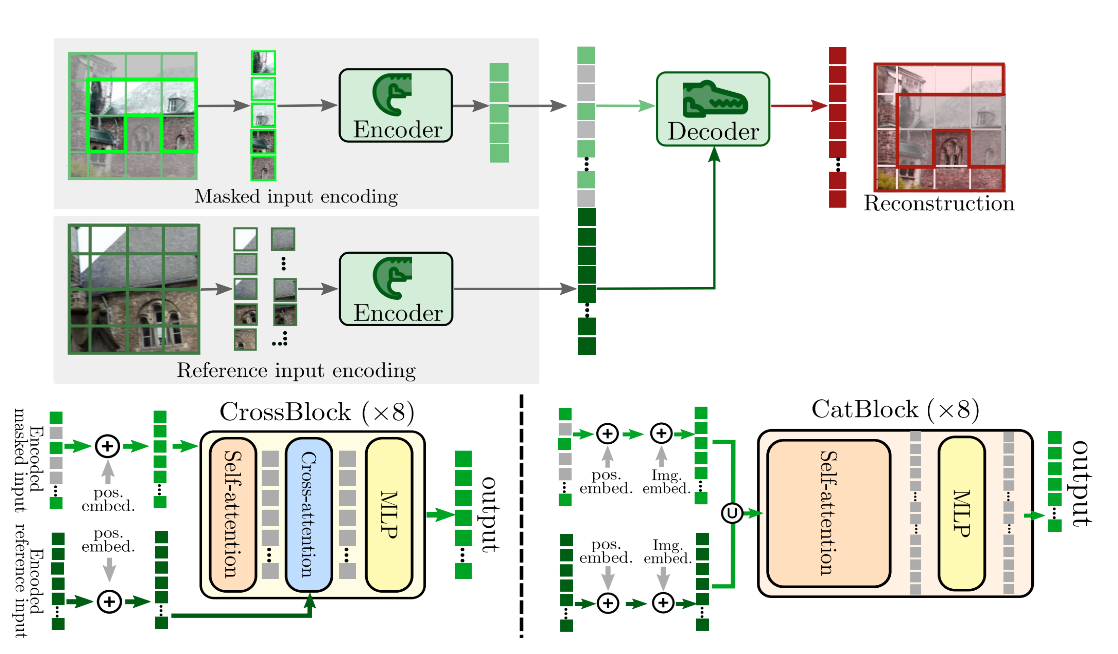
Philippe Weinzaepfel, Vincent Leroy, Thomas Lucas, Romain Brégier, Yohann Cabon, Vaibhav Arora, Leonid Antsfeld, Boris Chidlovskii, Gabriela Csurka, Jérôme Revaud
The pretext task of cross-view completion where the first input image is partially masked, and this masked content has to be reconstructed from the visible content and the second image. This pretext task leads to significantly improved performance for monocular 3D vision downstream tasks. I worked on exploring the model to integrate the downstream task of Stereo Matching task.
NeurIPS 2022 [Paper Link]
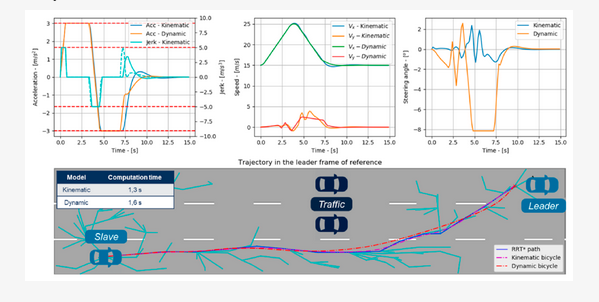
Ouafae El Ganaoui-Mourlan, Stephane Camp, Thomas Hannagan, Vaibhav Arora, Martin De Neuville, Vaios Andreas Kousournas
This work proposes an approach that enables a vehicle to autonomously join a platoon with optimized trajectory in the presence of dynamical traffic obstacles. A notable aspect is the use of Model Predictive Control (MPC) optimization of the planned path, in conjunction with a variant of the Rapidly-exploring Random Trees (RRT*) algorithm for the purpose of platoon formation.
MDPI Sustainability 2021 [Paper Link]

Miriam Di Russo, Vaibhav Arora, Ronghui Lyu, Jerry C. Ku
This paper details the vehicle testing activities performed during the Year 4 of the EcoCAR 3 competition by the Wayne State University team on a Pre-Transmission Parallel PHEV. The paper focuses on two main testing platforms: the chassis dynamometer and the closed-course track (on-road).
SAE Technical Paper 2019 [Paper Link]